Event-based sampling algorithm for setpoint tracking using a state-feedback controller
Jun 13, 2016·
,
 ·
0 min read
·
0 min read
Fairouz Zobiri
Nacim Meslem
Brigitte Bidegaray-Fesquet
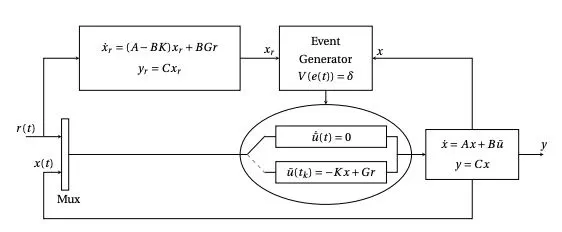 Event-based tracking controller scheme
Event-based tracking controller scheme
Abstract
Event-based control techniques are investigated for output reference tracking in the case of linear time-invariant systems. In event-based control, the controller remains at rest if the system is behaving according to some predefined conditions, the feedback loop being closed only when the system states violate these conditions. In this work a reference system, which consists in the continuously-controlled version of the system under study, is employed. Based on the difference between the state of the event-triggered system and that of the reference system, we define a Lyapunov-like function, and show that if we can keep this function confined to a certain region, the tracking error would also be bounded. The trespassing of this function outside of the desired region is used as an event-triggering condition.
Type
Publication
EBCCSP 2016 - 2nd IEEE Conference on Event-Based Control Communication and Signal Processing, Krakow, Poland (2016)