Self-triggered stabilizing controllers for linear continuous-time systems
Jul 14, 2020·
,
 ·
0 min read
·
0 min read
Fairouz Zobiri
Nacim Meslem
Brigitte Bidegaray-Fesquet
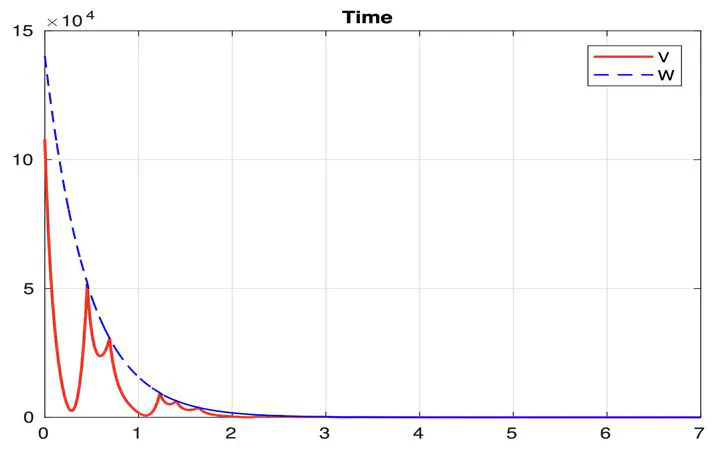 Pseudo-Lyapunov function
Pseudo-Lyapunov function
Abstract
Self-triggered control is an improvement on event-triggered control methods. Unlike the latter, self-triggered control does not require monitoring the behavior of the system constantly. Instead, self-triggered algorithms predict the events at which the control law has to be updated before they happen, relying on system model and past information. In this work, we present a self-triggered version of an event-triggered control method in which events are generated when a pseudo-Lyapunov function (PLF) associated with the system increases up to a certain limit. This approach has been shown to considerably decrease the communications between the controller and the plant, while maintaining system stability. To predict the intersections between the PLF and the upper limit, we use a simple and fast root-finding algorithm. The algorithm mixes the global convergence properties of the bisection and the fast convergence properties of the Newton-Raphson method. Moreover, to ensure the convergence of the method, the initial iterate of the algorithm is found through a minimization algorithm.
Type
Publication
International Journal of Robust and Nonlinear Control, 30(16), 6502–6517 (2020)