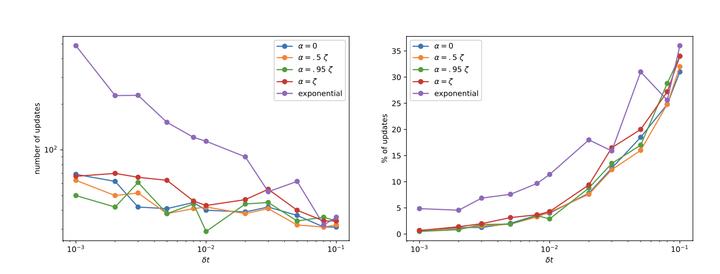
 Number of updates with respect to the time-step in the rotating matrix case
Number of updates with respect to the time-step in the rotating matrix case
Abstract
In this paper, we introduce an event-triggered control method that relies on contraction analysis. Contraction analysis considers stability with respect to a nominal trajectory rather than an equilibrium point. If two neighboring trajectories of a system are located in a contraction region, they will tend to each other and to a nominal trajectory. In the event-triggered control algorithm that we introduce, we suggest to update the control law whenever the system trajectory is about to leave the contraction region. We show that such a scheduling of the control law guarantees system stability, and we show that a minimum inter-event time exists between consecutive updates of the control law. We also show how to place the system trajectory in a contraction region and discuss the conditions of existence of the required transformation to perform that.